
多回声支持
PPS输入信号
环境抵抗力")
- 产品分类:
全国咨询热线: 0755-26891790
立即咨询HOKUYO 三维激光雷达 YVT-35LX
产品介绍:一体型三维激光雷达,无需外加云台。
说明:
- >此扫描仪使用TOF原理的脉冲激光束测量距离。
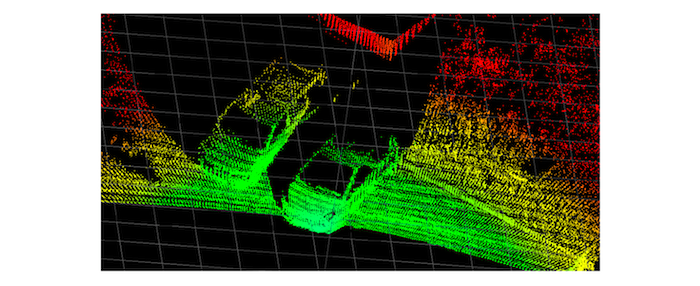
- >激光束在宽的3D场中发射,提供对物体的高度,宽度和深度信息的访问。传统的二维扫描仪无法提供此信息。
广视野
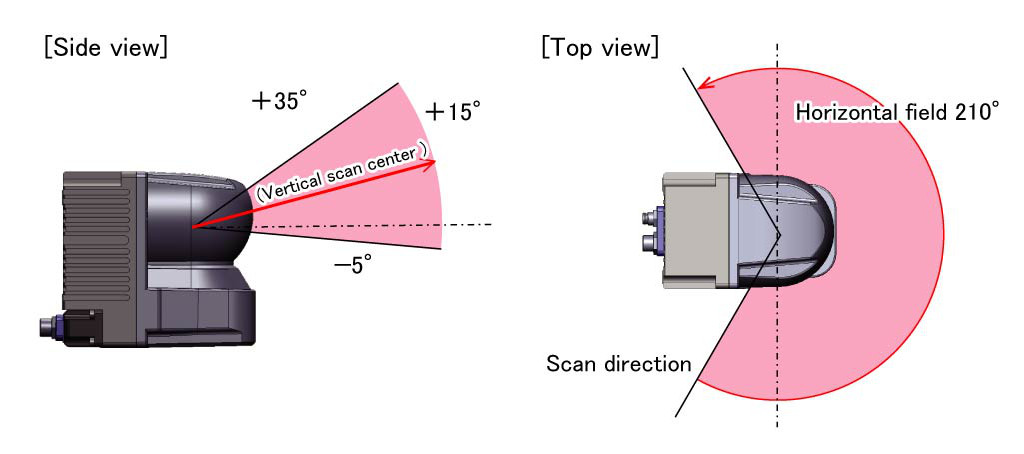
激光束水平转向210°,垂直转向40°。可检测范围是前方35米,侧面大约14米。
隔行扫描模式
激光发射位置在每个周期中逐渐移动以产生更密集的点云。可以将密度水平增加20倍,垂直增加10倍。
包括加速度计(陀螺仪)
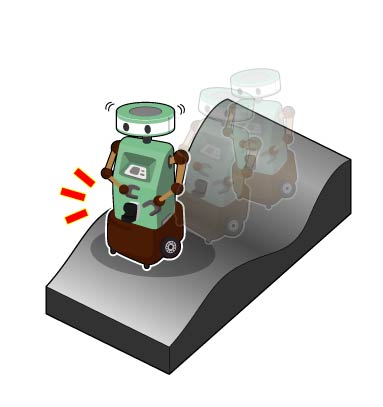
检测角速度和加速度。由于包含加速度计,因此您无需应用时间同步。使用的加速度计是InvenSense的MPU-6500。有关详细信息,请参阅制造商手册。注意:此扫描仪使用机械转向机制,这会增加接收数据的噪音。
多回声支持
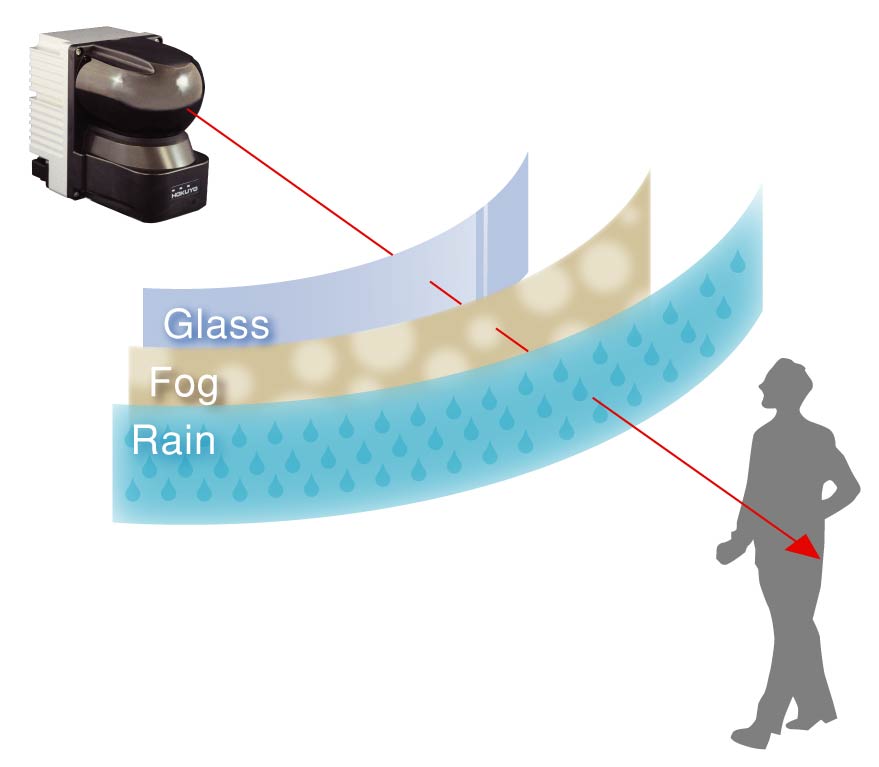
在同一方向,来自雨,灰尘和雾的反射可能产生多重回报。报告每个回程的距离测量值。对于户外使用,多重回波功能可以将雨,雾和雾分离目标物体和外壳盖。支持4个回声。注意:在内部,此扫描器处理8个返回并仅报告4个回声。
PPS输入信号
与GPS一起使用时,PPS信号会重置扫描仪的时间戳,以消除时钟漂移错误。
环境抵抗力
它适用于IP67保护结构,100,000lx环境照度和10G赋予电阻的各种环境。
产品规格:
发布时间:2023-04-02
相关标签: 日本北阳 北阳传感器 3D激光雷达价格 北阳传感器 3D激光雷达批发
上一个:北阳传感器 安全激光雷达 保护范围广 主从功能 双重保护模式
下一个:北阳传感器 激光雷达 激光扫描图像 光学窗口污染警告功能 切换功能



相关新闻
- ChatGPT在工业领域有哪些应用? 2023-05-23
- 动力电池顶盖焊设备解决方案 2023-05-16
- 湘聚荣获山洋电气深圳2018年度中国代理商大会销售银奖 2023-04-02
- 今天,湘聚为975万考生加油! 2023-04-02
- 事实上 — 六一儿童节放假 我们也是有传统的 2023-04-02


